






Роботы для телеинспекции и бестраншейного ремонта трубопроводов
В статье рассматривается применение самоходных телевизионных роботов с функциями фрезерования и заделки трубопроводов изнутри (при помощи шпателя с полимерным составом или пакера с круговым внутренним бандажом) в техпроцессе бестраншейного ремонта коммунальных трубопроводов различными методами, такими как протяжка полиэтиленовой трубы внутри старого стального трубопровода, или санация полимерным рукавом (методом «Инситуформ» и другими), или напыление полимера либо внутреннего цементно-песчаного покрытия и т. д.
Роботы для телеинспекции и бестраншейного ремонта трубопроводов
В статье рассматривается применение самоходных телевизионных роботов с функциями фрезерования и заделки трубопроводов изнутри (при помощи шпателя с полимерным составом или пакера с круговым внутренним бандажом) в техпроцессе бестраншейного ремонта коммунальных трубопроводов различными методами, такими как протяжка полиэтиленовой трубы внутри старого стального трубопровода, или санация полимерным рукавом (методом «Инситуформ» и другими), или напыление полимера либо внутреннего цементно-песчаного покрытия и т. д.

При проведении работ по бестраншейной санации водопровода, канализации или газопровода нередко возникает необходимость использования самоходных телеинспекционных и ремонтных роботов.
Прежде всего нужно упомянуть, что перед проведением бестраншейного ремонта трубопровода необходимо провести телеинспекцию участков, подлежащих ремонту. Это поможет получить достоверную информацию о внутреннем состоянии трубопровода, принять правильное решение о способе ремонта и объеме предстоящих работ. После завершения работ по санации также проводят телеинспекцию для проверки качества выполненных работ и предъявления результатов заказчику.
Указанные работы выполняют, как правило, самоходными роботами для телеинспекции, которые не имеют других (ремонтных) функций и возможностей. Это связано с тем, что роботы для телеинспекции легче, компактнее, дешевле и удобнее при выполнении видеодиагностики трубопровода, чем ремонтные роботы. Кроме того, роботы для телеинспекции имеют значительно более легкий и тонкий кабель, чем роботы для фрезерования или внутренней заделки трубы.
По результатам видеообследования на подлежащем ремонту участке трубопровода выявляются места, создающие проблемы для того или иного вида санации. Это могут быть металлические ремонтные штыри (чопы), или острый грат на сварном шве стального трубопровода, или торчащая арматура и куски бетона в железобетонном трубопроводе, или другие выступы и неровности, препятствующие всем упомянутым выше методам санации, а также сквозные отверстия большого диаметра, которые делают невозможным ремонт цементно-песчаной облицовкой или напылением полимера, а при особенно больших отверстиях и санацию полимерным рукавом.
Ремонт таких проблемных мест возможен разными способами. Например, ремонтные штыри (чопы) можно вырвать скребком при прочистке (нужно учитывать, что после этого останутся большие отверстия), а любой дефект можно устранить путем локальной раскопки. Но очевидно, что большое количество дополнительных раскопок дискредитирует сам метод бестраншейного ремонта. Кроме того, во многих случаях раскопка в месте дефекта может быть трудно организуема или невозможна (если над местом дефекта проходят автотрасса или трамвайные пути и т. п.). Для решения таких задач и были созданы ремонтные роботы.
Под ремонтными роботами понимают оборудование, способное проходить по трубопроводу расстояние в десятки или даже сотни метров и выполнять в трубопроводе различные виды ремонтных работ. Ремонтные роботы вводятся в трубопровод через колодец, если речь идет о самотечной канализации, либо через вырезку в трубе в колодце (или сделанном для этого котловане), если речь идет о напорном водопроводе или газопроводе и т. п. Управление ремонтными роботами осуществляется по кабелю от поста управления, который находится в автомобиле, располагаемом в непосредственной близости от колодца или котлована. Функционально ремонтные роботы можно разделить на роботы для выполнения фрезерных и заделочных работ.
Под заделочными работами при этом понимаются замазка (заделка) внутренней поверхности трубопровода полимерными материалами при помощи дистанционно управляемого шпателя того или иного вида или другого приспособления.
В отдельную группу заделочных роботов можно выделить системы телеинспекции трубопроводов, оснащенные пневматическим пакерами для установки на внутреннюю поверхность труб бандажей из стеклоткани с полимерным составом, либо ленты из нержавеющей стали с резиновой прокладкой для заделки отверстий и прочих дефектов.
Под фрезерными работами понимаются: подрезка выступающих элементов, зачистка, фрезерование, шлифование, вырезка отверстий и т. д. При этом используются такие инструменты, как фрезы (различной формы и из различных материалов в зависимости от назначения), отрезные или шлифовальные круги, металлические щетки и пр. Основным элементом фрезерного робота является шпиндель, который может быть пневматическим, гидравлическим или электрическим.
На сегодня фрезерные и заделочные роботы способны обслуживать широкий диапазон диаметров трубопроводов – от 100 до 900 мм.
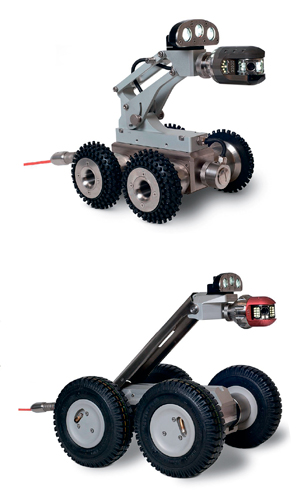
Как фрезерные, так и заделочные роботы имеют в своем составе видеокамеру и колесный движитель для перемещения по трубопроводу. Как правило, в системе фрезерного робота есть еще система подачи воды на режущий инструмент (для его охлаждения), а также на стекло видеокамеры – для ее очистки от продуктов фрезерования (пыли и грязи).
Как правило, фрезерный робот для трубопроводов представляет собой самоходную тележку, оснащенную фрезерной головкой и видеокамерой, управляемую по специальному комбинированному кабелю из автомобиля-лаборатории и способную перемещаться по трубопроводу и выполнять фрезерные и подрезные работы, а также локальную зачистку в трубопроводе.
Можно оговориться, что в самом начале появления фрезерных роботов они были значительно проще и у ряда производителей представляли собой просто пневматическую фрезерную головку, перемещаемую при помощи электроприводов по трем координатам (горизонталь, вертикаль и ротация), устанавливаемую на салазках и протаскиваемую по трубопроводу тросом.
Такой простейший робот был без видеокамеры и при выполнении фрезерных работ использовалась какая-либо сторонняя система телеинспекции, вводимая в трубопровод с другого конца обследуемого участка. Однако сейчас большинство производителей отказались от таких простых систем и предлагают полноценные робототехнические системы, способные выполнять все необходимые для работы функции.
У современного фрезерного робота также присутствует фрезерная головка с трехкоординатным электрическим приводом ее перемещения. Сегодня традиционно используются пневматические и гидравлические фрезерные головки, кроме того, все большую популярность приобретают электрические фрезерные головки, которые являются наиболее перспективными.
Мощность фрезерной головки является одной из важнейших характеристик фрезерного робота. Ниже приведен пример мощностей различных шпинделей фрезерных головок, предлагаемых одним из ведущих производителей (табл. 1).
| Таблица 1 Пример мощностей различных шпинделей фрезерных головок |
|||||||||||||||||||||||||
|
|||||||||||||||||||||||||
Недостатками пневматического шпинделя являются низкий КПД и необходимость использования мощного компрессора. Однако при этом для самых малых диаметров труб (от 100 мм) альтернативы пневматическому шпинделя не существует. Недостатками гидравлического шпинделя являются опасность утечки рабочей жидкости и попадания ее в трубопровод (что особенно критично для водопровода), а также высокая стоимость (с учетом дорогостоящей гидростанции). Ранее электрический шпиндель малых габаритов сильно отставал от пневматического и гидравлического по мощности, но сейчас они достаточно близки, хотя преимущество по данному параметру остается за гидравликой. Кроме того, при применении электрического шпинделя возможно использование более тонкого комбинированного кабеля, так как не требуется наличия в нем гидравлических и пневматических шлангов.
Видеокамера фрезерного робота может смотреть как вперед, так и на рабочий инструмент (фрезу). Видеокамеры фрезерных роботов обычно оснащают стеклоочистителем и (или) системой подачи воды на стекло видеокамеры – для его очистки от продуктов фрезерования. Фрезерным роботом можно делать и телеинспекцию трубопровода, однако использовать его под эту задачу не рекомендуется, так как есть более дешевые и удобные специализированные системы телеинспекции.
Фрезерный робот для бестраншейной санации, как правило, оснащают приводом упора (пневматическим или электрическим), который обеспечивает жесткую фиксацию робота в трубопроводе во время фрезерования. Иногда привод упора совмещают с верхними колесами, при этом робот, распертый в трубопроводе (за счет верхних колес, с усилием прижимаемых к верхнему своду трубы), может двигаться по трубопроводу при помощи собственного привода перемещения. В этом случае сила тяги робота увеличивается, и он может протащить тяжелый кабель на значительно большее расстояние.
Некоторые производители конструктивно разделяют фрезерную головку (не самоходную, на пассивных колесах) и движитель – отдельный механизм, предназначенный для перемещения фрезерной головки по трубе. Такая система позволяет еще больше повысить тяговое усилие. Кроме того, один движитель можно использовать и для фрезерной головки, и для заделочной головки со шпателем. Задачи фрезерных роботов представлены в табл. 2.
| Таблица 2 Задачи фрезерных роботов |
||||||||
|
||||||||
* – данная операция больше характерна для Европы, так как там отводы часто расположены вне колодцев, тогда как в России отводы, как правило, располагаются в колодцах, и их вскрытие может быть выполнено без помощи роботов. |
Заделочный робот представляет собой самоходную тележку с заделочной головкой (шпателем или устройством заделки стыков в тройниках и т. п.), оснащенную видеокамерой и управляемую по кабелю от поста управления, находящегося в автомобиле.
Пакер представляет собой надувной пневматический цилиндр из прочной резины, установленный на пассивные колеса, работающий совместно с самоходным роботом для телеинспекции трубопроводов или с другой системой телеинспекции, перемещаемый по трубопроводу при помощи робота для телеинспекции или проталкиваемый сборными штангами. Существуют относительно короткие пакеры (длиной до 500 мм) и длинные гибкие пакеры – до нескольких метров.
Короткие пакеры, как правило, применяются для установки бандажей из ленты из нержавеющей стали с резиновым уплотнением и используются как на канализации, так и на водопроводе.
| Таблица 3 Задачи заделочных роботов и пакеров |
||||||||
|
||||||||
* – данная операция больше характерна для Европы, так как там отводы часто расположены вне колодцев, тогда как в России отводы, как правило, располагаются в колодцах и их вскрытие и последующая заделка могут быть выполнено без помощи роботов. |
Длинные пакеры – от 0,6 до 5 м, используются для установки исключительно полимерных бандажей, представляющих собой стеклоткань, пропитанную полимером, и в основном на канализации. Такие пакеры используются для локального ремонта труб диаметром от 35 до 1200 мм.
Длинные пакеры достаточно гибкие, так как при вводе в трубопровод через колодец они должны изгибаться. После ввода в трубопровод упругие свойства длинного пакера обеспечивают его распрямление в трубе и сохранение прямой формы.
Кроме того, внутренние бандажи можно использовать для локальной заделки свищей в водопроводе при аварийных ремонтах, а последовательная установка внутренних бандажей на определенном участке трубопровода при помощи пакера может являться самостоятельным методом бестраншейного ремонта.
При работе заделочных роботов и пакеров, устанавливающих полимерные бандажи, одним из наиболее критичных вопросов является выбор полимерного состава. С одной стороны, данный полимерный состав должен иметь достаточно продолжительное «время жизни», т. е. время, когда этот полимер можно наносить, время от смешения двух компонентов полимера до его загустевания, при котором работать им уже нельзя. Это время должно быть не менее 40 минут, иначе будет проблематично успеть ввести пакер с бандажом в трубопровод и установить его в нужном месте. С другой стороны, полимерный состав должен иметь ограниченное время затвердевания до состояния, когда его можно нагружать давлением и т. д. Это время должно быть не более 24 часов (желательно меньше), так как оно влияет на общее время выполнения всех работ по бестраншейной санации, на время отключения и простоя трубопровода.
Эти два параметра (время жизни и время затвердевания до рабочего состояния) находятся в прямом противоречии. Кроме того, они существенно зависят от температуры окружающей среды (т. е. они различны зимой и летом, на открытом воздухе и внутри трубопровода) и требуют самого серьезного внимания при бестраншейном ремонте трубопроводов полимерными составами.
С этой точки зрения бестраншейный ремонт трубопроводов бандажами из нержавеющей стали с резиновыми уплотнениями обладает существенным преимуществом, однако он более дорогостоящий. Кроме того, бандажи из нержавеющей стали не могут быть установлены на неровные поверхности (стык труб с небольшим вертикальным смещением, сварной шов в месте дефекта и т. п.), тогда как для полимерных бандажей такие задачи вполне решаемы.
Материал предоставлен ООО «Вистарос»

Статья опубликована в журнале “Сантехника” за №3'2019
 pdf версия
pdf версия 


Статьи по теме
- Комментарии к СП 30.13330.2016 «СНиП 2.04.01-85* “Внутренний водопровод и канализация зданий”»
Сантехника №4'2017 - Диагностика трубопроводов. Акустические течеискатели
Сантехника №5'2017 - Капитальный ремонт. Соединения труб из оцинкованной стали в жилых домах
Сантехника №5'2018 - Скачки давления в гидравлических системах: риски при работе датчиков и другого оборудования
Сантехника №1'2019 - Применение полимерных труб в промышленности
Сантехника №4'2020 - Оптимизация проектирования и энергоэффективность трубопроводных сетей инженерных систем здания
АВОК №4'2021 - Оборудование для систем внутренней канализации, предназначенное для скрытой установки
Сантехника №5'2021 - Инженерные системы жилых зданий: рекомендации эксперта
Сантехника №4'2023 - Применение пластиковых труб для систем водоснабжения и водоотведения при капитальном ремонте зданий
Сантехника №4'2015 - Крепеж горизонтальных трубопроводов внутренних инженерных систем: возможные технические решения
АВОК №4'2024


Подписка на журналы




